MPU6050 模块
https://doc.embedfire.com/mcu/stm32/f103badao/std/zh/latest/book/MPU6050.html#id22
接下来我们使用传感器实例来讲解如何检测物体的姿态。在我们的开发板上有引出I2C总线接口,方便用于扩展使用I2C协议通讯的传感器模块。它是一种六轴传感器模块, 采用InvenSense公司的MPU6050作为主芯片,能同时检测三轴加速度、三轴陀螺仪(三轴角速度)的运动数据以及温度数据。 利用MPU6050芯片内部的DMP模块(Digital Motion Processor数字运动处理器),可对传感器数据进行滤波、融合处理, 它直接通过I2C接口向主控器输出姿态解算后的姿态数据,降低主控器的运算量。其姿态解算频率最高可达200Hz, 非常适合用于对姿态控制实时要求较高的领域。常见应用于手机、智能手环、四轴飞行器及计步器等的姿态检测。
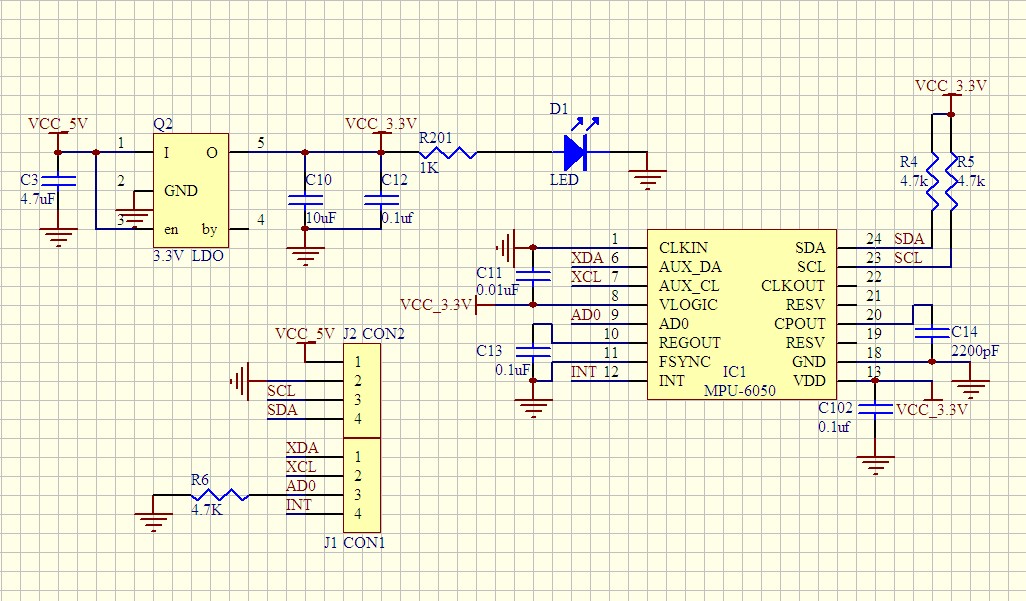
原理图
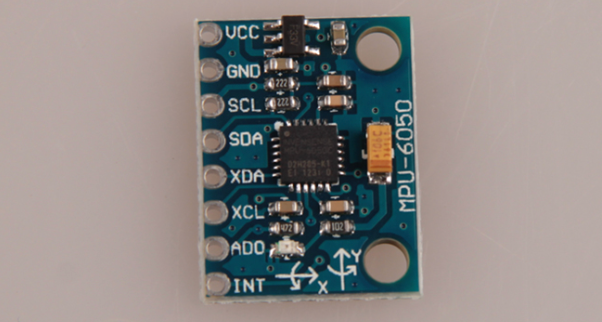
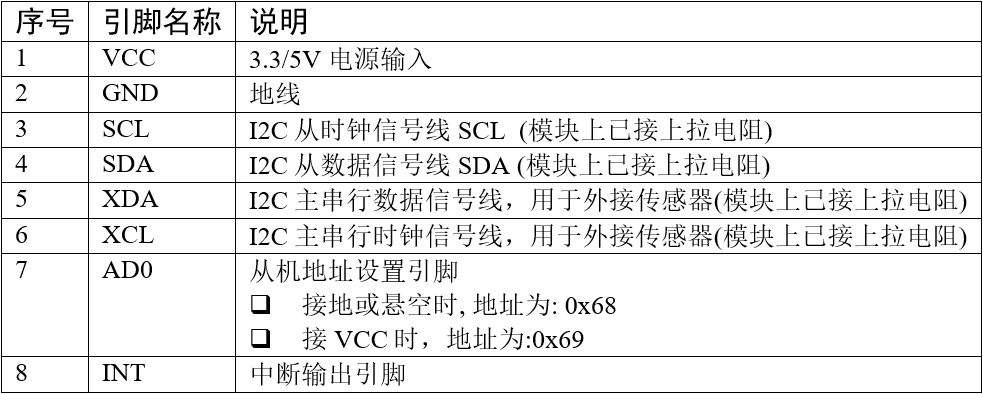
它的硬件非常简单,SDA与SCL被引出方便与外部I2C主机连接,看图中的右上角,可知该模块的I2C通讯引脚SDA及SCL已经连接了上拉电阻, 因此它与外部I2C通讯主机通讯时直接使用导线连接起来即可;而MPU6050模块与其它传感器通讯使用的XDA、XCL引脚没有接上拉电阻,要使用时需要注意。 模块自身的I2C设备地址可通过AD0引脚的电平控制,当AD0接地时,设备地址为0x68(七位地址),当AD0接电源时,设备地址为0x69(七位地址)。 另外,当传感器有新数据的时候会通过INT引脚通知STM32。
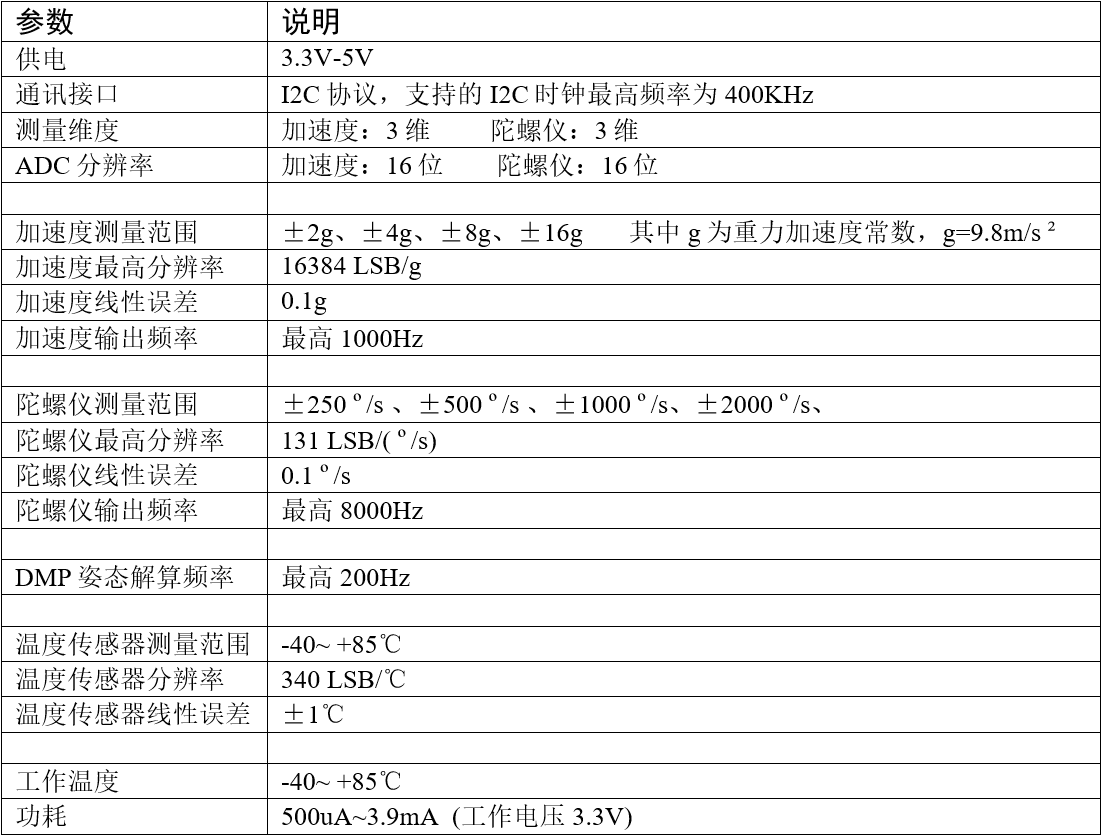
参数
原理
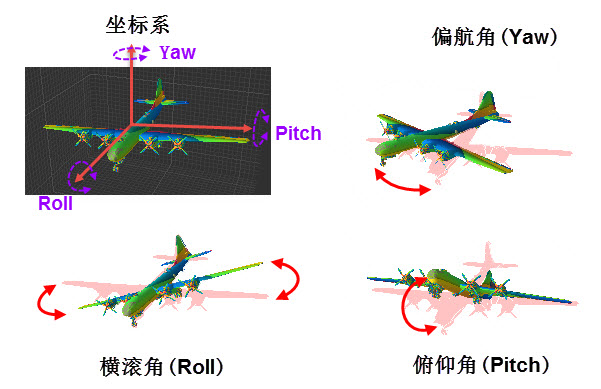
姿态检测
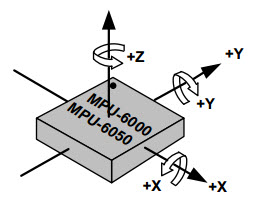
在飞行器中,飞行姿态是非常重要的参数,表示飞机姿态的偏航角横滚角及俯仰角 , 以飞机自身的中心建立坐标系,当飞机绕坐标轴旋转的时候,会分别影响偏航角、横滚角及俯仰角。